A state with arbitrary dimension defined in a DetPlane. More...
#include <StateOnPlane.h>
Public Member Functions | |
| StateOnPlane (const AbsTrackRep *rep=NULL) | |
| StateOnPlane (const TVectorD &state, const SharedPlanePtr &plane, const AbsTrackRep *rep) | |
| StateOnPlane (const TVectorD &state, const SharedPlanePtr &plane, const AbsTrackRep *rep, const TVectorD &auxInfo) | |
| StateOnPlane & | operator= (StateOnPlane other) |
| void | swap (StateOnPlane &other) |
| virtual | ~StateOnPlane () |
| const TVectorD & | getState () const |
| TVectorD & | getState () |
| const TVectorD & | getAuxInfo () const |
| TVectorD & | getAuxInfo () |
| const SharedPlanePtr & | getPlane () const |
| const AbsTrackRep * | getRep () const |
| void | setState (const TVectorD &state) |
| void | setPlane (const SharedPlanePtr &plane) |
| void | setStatePlane (const TVectorD &state, const SharedPlanePtr &plane) |
| void | setAuxInfo (const TVectorD &auxInfo) |
| void | setRep (const AbsTrackRep *rep) |
| double | extrapolateToPlane (const SharedPlanePtr &plane, bool stopAtBoundary=false, bool calcJacobianNoise=false) |
| double | extrapolateToLine (const TVector3 &linePoint, const TVector3 &lineDirection, bool stopAtBoundary=false, bool calcJacobianNoise=false) |
| double | extrapolateToPoint (const TVector3 &point, bool stopAtBoundary=false, bool calcJacobianNoise=false) |
| double | extrapolateToPoint (const TVector3 &point, const TMatrixDSym &G, bool stopAtBoundary=false, bool calcJacobianNoise=false) |
| double | extrapolateToCylinder (double radius, const TVector3 &linePoint=TVector3(0., 0., 0.), const TVector3 &lineDirection=TVector3(0., 0., 1.), bool stopAtBoundary=false, bool calcJacobianNoise=false) |
| double | extrapolateToSphere (double radius, const TVector3 &point=TVector3(0., 0., 0.), bool stopAtBoundary=false, bool calcJacobianNoise=false) |
| double | extrapolateBy (double step, bool stopAtBoundary=false, bool calcJacobianNoise=false) |
| double | extrapolateToMeasurement (const AbsMeasurement *measurement, bool stopAtBoundary=false, bool calcJacobianNoise=false) |
| TVector3 | getPos () const |
| TVector3 | getMom () const |
| TVector3 | getDir () const |
| void | getPosMom (TVector3 &pos, TVector3 &mom) const |
| void | getPosDir (TVector3 &pos, TVector3 &dir) const |
| TVectorD | get6DState () const |
| double | getMomMag () const |
| int | getPDG () const |
| double | getCharge () const |
| double | getQop () const |
| double | getMass () const |
| void | setPosMom (const TVector3 &pos, const TVector3 &mom) |
| void | setPosMom (const TVectorD &state6) |
| void | setChargeSign (double charge) |
| void | setQop (double qop) |
| virtual void | Print (Option_t *option="") const |
Protected Attributes | |
| TVectorD | state_ |
| TVectorD | auxInfo_ |
| SharedPlanePtr | sharedPlane_ |
Private Attributes | |
| const AbsTrackRep * | rep_ |
| Shared ownership. '!' in order to silence ROOT, custom streamer writes and reads this. | |
Detailed Description
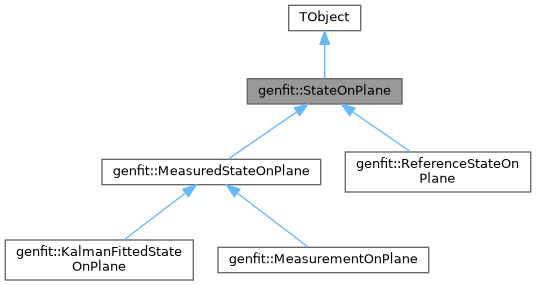
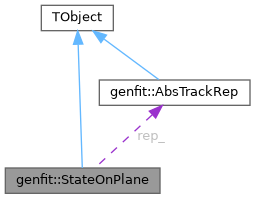
A state with arbitrary dimension defined in a DetPlane.
The dimension and meaning of the state_ vector are defined by the track parameterization of the rep_. sharedPlane_ is a shared_pointer, the ownership over that plane is shared between all StateOnPlane objects defined in that plane. The definition of the state is bound to the TrackRep rep_. Therefore, the StateOnPlane contains a pointer to a AbsTrackRep. It will provide functionality to extrapolate it and translate the state it into cartesian coordinates. Shortcuts to all functions of the AbsTrackRep which use this StateOnPlane are also provided here.
Definition at line 45 of file StateOnPlane.h.
Constructor & Destructor Documentation
◆ StateOnPlane() [1/3]
|
inline |
Definition at line 142 of file StateOnPlane.h.
◆ StateOnPlane() [2/3]
|
inline |
Definition at line 150 of file StateOnPlane.h.
◆ StateOnPlane() [3/3]
|
inline |
Definition at line 157 of file StateOnPlane.h.
◆ ~StateOnPlane()
|
inlinevirtual |
Definition at line 57 of file StateOnPlane.h.
Member Function Documentation
◆ extrapolateBy()
|
inline |
Definition at line 96 of file StateOnPlane.h.
◆ extrapolateToCylinder()
|
inline |
Definition at line 87 of file StateOnPlane.h.
◆ extrapolateToLine()
|
inline |
Definition at line 76 of file StateOnPlane.h.
◆ extrapolateToMeasurement()
|
inline |
Definition at line 99 of file StateOnPlane.h.
◆ extrapolateToPlane()
|
inline |
Definition at line 73 of file StateOnPlane.h.
◆ extrapolateToPoint() [1/2]
|
inline |
Definition at line 80 of file StateOnPlane.h.
◆ extrapolateToPoint() [2/2]
|
inline |
Definition at line 83 of file StateOnPlane.h.
◆ extrapolateToSphere()
|
inline |
Definition at line 92 of file StateOnPlane.h.
◆ get6DState()
|
inline |
Definition at line 109 of file StateOnPlane.h.
◆ getAuxInfo() [1/2]
|
inline |
Definition at line 62 of file StateOnPlane.h.
◆ getAuxInfo() [2/2]
|
inline |
Definition at line 61 of file StateOnPlane.h.
◆ getCharge()
|
inline |
Definition at line 112 of file StateOnPlane.h.
◆ getDir()
|
inline |
Definition at line 106 of file StateOnPlane.h.
◆ getMass()
|
inline |
Definition at line 114 of file StateOnPlane.h.
◆ getMom()
|
inline |
Definition at line 105 of file StateOnPlane.h.
◆ getMomMag()
|
inline |
Definition at line 110 of file StateOnPlane.h.
◆ getPDG()
|
inline |
Definition at line 111 of file StateOnPlane.h.
◆ getPlane()
|
inline |
Definition at line 63 of file StateOnPlane.h.
◆ getPos()
|
inline |
Definition at line 104 of file StateOnPlane.h.
◆ getPosDir()
|
inline |
Definition at line 108 of file StateOnPlane.h.
◆ getPosMom()
|
inline |
Definition at line 107 of file StateOnPlane.h.
◆ getQop()
|
inline |
Definition at line 113 of file StateOnPlane.h.
◆ getRep()
|
inline |
Definition at line 64 of file StateOnPlane.h.
◆ getState() [1/2]
|
inline |
Definition at line 60 of file StateOnPlane.h.
◆ getState() [2/2]
|
inline |
Definition at line 59 of file StateOnPlane.h.
◆ operator=()
|
inline |
Definition at line 164 of file StateOnPlane.h.
◆ Print()
|
virtual |
Reimplemented in genfit::MeasuredStateOnPlane, genfit::MeasurementOnPlane, and genfit::ReferenceStateOnPlane.
Definition at line 30 of file StateOnPlane.cc.
◆ setAuxInfo()
|
inline |
Definition at line 69 of file StateOnPlane.h.
◆ setChargeSign()
|
inline |
Definition at line 118 of file StateOnPlane.h.
◆ setPlane()
|
inline |
Definition at line 67 of file StateOnPlane.h.
◆ setPosMom() [1/2]
|
inline |
Definition at line 116 of file StateOnPlane.h.
◆ setPosMom() [2/2]
|
inline |
Definition at line 117 of file StateOnPlane.h.
◆ setQop()
|
inline |
Definition at line 119 of file StateOnPlane.h.
◆ setRep()
|
inline |
Definition at line 70 of file StateOnPlane.h.
◆ setState()
|
inline |
Definition at line 66 of file StateOnPlane.h.
◆ setStatePlane()
|
inline |
Definition at line 68 of file StateOnPlane.h.
◆ swap()
|
inline |
Definition at line 169 of file StateOnPlane.h.
Member Data Documentation
◆ auxInfo_
|
protected |
Definition at line 127 of file StateOnPlane.h.
◆ rep_
|
private |
Shared ownership. '!' in order to silence ROOT, custom streamer writes and reads this.
Pointer to TrackRep with respect to which StateOnPlane is defined
Definition at line 134 of file StateOnPlane.h.
◆ sharedPlane_
|
protected |
Definition at line 128 of file StateOnPlane.h.
◆ state_
|
protected |
Definition at line 126 of file StateOnPlane.h.
The documentation for this class was generated from the following files:
- genfit/core/include/StateOnPlane.h
- genfit/core/src/StateOnPlane.cc